Improving uptime in industrial robotic systems
The reality is often more pragmatic. Schedules of work are arranged to optimize uptime and undertake preventative maintenance during periods that have the least impact on manufacturing. However, there are still times when maintenance engineers seemingly ‘sense’ impending failure of their robots and automation equipment. Could the implementation of sensing technologies, beyond the sensors needed for process monitoring, deliver improvements in predictive maintenance?
Scheduled downtime to improve uptime
It is unlikely that we will see factories with row upon row of unskilled worker undertaking the menial manufacturing tasks that were common at the turn of the 20th century. Today’s factories are highly automated with barely the need for a human hand to touch the product during the manufacturing process. The maintenance teams play a key role in keeping the machines alive, as unplanned downtime can quickly eat into slim profit margins.
At the heart of any manufacturing operation is a maintenance, repair and operation (MRO) plan. Through careful scheduling, preventative maintenance (PM) is arranged so that it has minimal impact on the manufacturing flow. The PM plan, when implemented well, can extend the life of the machines and robots being used. A robot’s life can extend to 20 years if regularly maintained, providing the organization with an excellent return on investment (RoI).
Robot manufacturers, such as Yaskawa, Fanuc and Kuka, supply detailed PM plans. They cover a range of activities, from visual inspections of motion, cables and harnesses, to repeatability checks, memory backups and lubrication. These scheduled maintenance intervals can lie anywhere from around 4,000 to 10,000 hours of operation.

preventative maintenance plan. Adherence
to the plan can result in 20 years of service.
Of course, customer demand and PM schedules cannot always be synchronized with one another. Robot loading, motion and speed can result in more or less wear, resulting in maintenance occurring either too often, or not often enough. Operator training can also have an influence on wear. If the emergency halt button is used to stop the robot out of convenience, rather than following using the manufacturer’s shutdown mechanism, the braking system can suffer from early wear.
To date, continual improvement programs (CIP) have been the primary method used to file away at reducing unexpected downtime while achieving a happy medium of planned downtime. But even these are reaching the point where the cost of improvement outweighs the potential cost savings.
The Goldilocks zone of maintenance
With the continued roll-out of Industry 4.0, plant managers are being offered an ever-increasing amount of data about their manufacturing locations. Internetworked systems and the data sharing it enables provide continual feedback on manufacturing or process status. Sensors are primarily focused upon either monitoring the process, such as temperature, pressure or volume, or safety, whether a valve is operational or a safety door is locked.
Stored data from these sensors can also be used for a hindsight analysis of what went wrong. If the time taken to empty a tank gradually took more time over a period of weeks, this knowledge could be used to determine an improved planned maintenance schedule for the tank’s outlet valve.
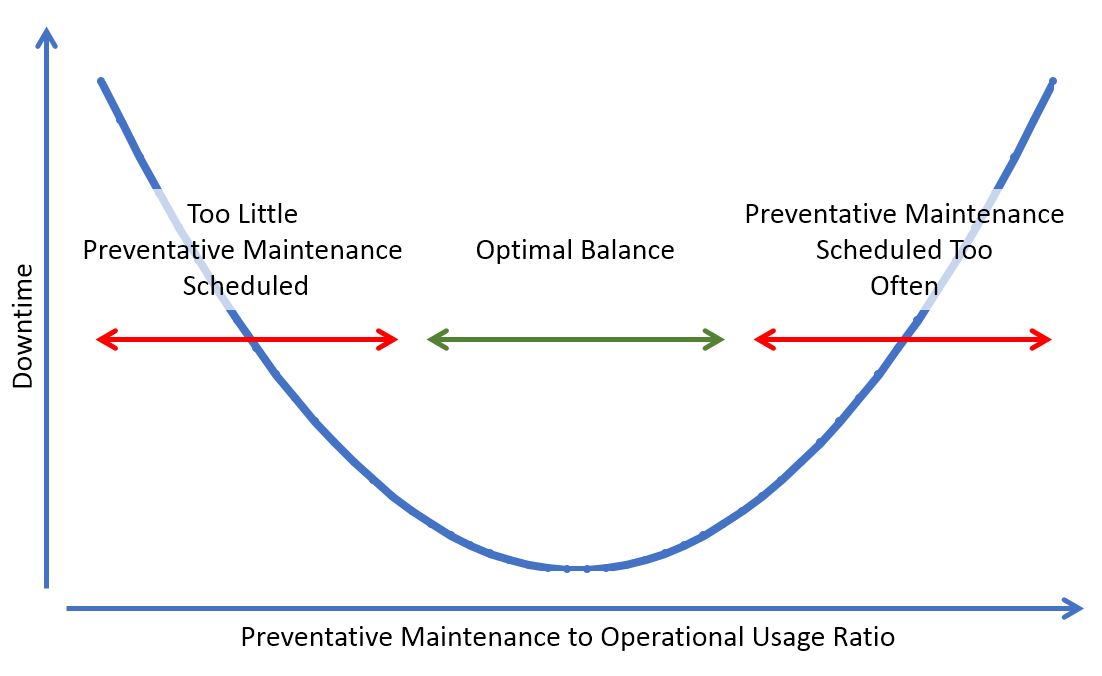
the Goldilocks zone – the optimal balance between
too much scheduled maintenance downtime and
the impact of too little.
One of the advantages of our maintenance team members is their uncanny ability to sense when something is about to go wrong. Humans draw upon all their senses and, when a machine doesn’t quite sound right, or seems to visibly judder a little too much, their gut instinct kicks in. Invariably they are correct in their instinct, sometimes managing to avoid significant downtime and the financial losses that would otherwise result from unplanned maintenance.
It is not inconceivable that affixing additional sensors to manufacturing equipment could help improve predictive maintenance. The aim here is to ensure that there is not too much preventative maintenance downtime, neither too much unexpected downtime – rather the balance should be just right.
The goal of these sensors is to monitor the machinery itself during operation to detect the changes that are signs of a pending failure. For example, by simultaneously monitoring current consumption, temperature, noise and motion, wear-related damage could be pre-empted in robotic joints.
How to tackle the challenge
Digital sensors integrate a lot of the signal conditioning, compensation and calibration making the implementation of such a concept relatively simple.
Current measurement solutions are available, integrated into low-profile packaging that can handle up to +/- 50A of AC or DC signal measurement. The high-precision TLI4970 is such a device, utilizing Hall sensor technology in a measurement principle that galvanically isolates the primary conductor from the secondary interface.

biasing, signal conditioning and conversion,
leaving a simple SPI control interface for the host
microcontroller.
Being a coreless measurement solution, the overall solution is very compact, and more accurate than open-loop systems using a magnetic core. The primary conductor (current rail) is integrated into the package, leaving no need for external calibration. Its output is also highly linear, without hysteresis, and effective suppression of stray fields is achieved using a differential measurement principle.
For the area of robotic joint motion detection, magnetic field measurement solutions can leverage the properties of Giant Magneto Resistance (GMR) sensors. Such devices provide angular measurement of commutated motors by monitoring magnetic fields in two planes. This sine and cosine output is passed to a digital signal processing block that uses the trigonometric ARCTAN2 function to deliver the true 360° angle of, for example, a motor rotor.

are oriented in such a way as to minimize
temperature effects. The X and Y axis signals
are then converted into a 360° angle.
The TLI5012B E1000 is just such a device, delivered as a pre-calibrated solution. The integrated GMR sensors are implemented in a full-bridge structure that ensures the maximum signal is available. This design also ensures that temperature effects on the individual sensors cancel each other out. An SPI compatible interface can be used to connect it with a microcontroller, providing access to the measurements calculated and the configuration registers.
A further integration feature of many sensors is a temperature measurement block. Devices such as the DPS310 digital barometric pressure sensors incorporate temperature sensing, negating the need to implement this function separately.
Compact audio sensing can be integrated through the use of microelectromechanical solutions, such as MEMS microphones. Integrated with analog-to-digital (ADC) converters and digital signal processing, they can also be integrated into the flow of digital data collection. The IM69D130 provides excellent sensitivity (+/- 1 dB) and a flat frequency response with low frequency roll of at 28 kHz. It is also suitable for noisy manufacturing environments with its Acoustic Overload Point of 130 dB SPL.

deliver an impressive Acoustic Overload Point of
130dB SPL.
To be of use, all this data needs to be collected and evaluated in real time to highlight potential mechanical failure. Furthermore, the integration needs to build upon existing Industry 4.0 networking technologies. Microcontrollers such as the XMC4000 family provide the low-level digital interfaces required to communicate with digital sensor technology. Additionally, they also support the industrial networking communication protocols, such as EtherCAT, required to integrate into industrial systems.
The XMC4000 family features a powerful ARM Cortex-M4F processor at their core, enabling the implementation of sensor fusion applications. The processor’s support for floating-point calculations and digital signal processing will also be beneficial in processing and evaluating the sensor data. Compact packaging, such as low-profile VQFN and LFBGA, ensure that both sensing and data processing can be simply integrated at the point of measurement.

a microcontroller, such as the XMC4000 series,
that feature industrial interfaces including EtherCAT.
With manufacturing facilities operating 24/7, such sensor fusion systems will be generating a lot of data. With intense scrutiny, it is possible that human operators could determine anomalies in some of the data collected. But with robots handling a multitude of loads and parts, it will be challenging to determine if, for example, differences in current consumption are purely load related or indicative of an impending breakdown.
Can artificial intelligence provide new insights?
This is where the essence of the experienced maintenance engineer needs to be replicated. It is the combination of overlaid data, such as knowledge of load, sound, vibration, warming and motion that allows them to sense a pending failure. This falls squarely into the domain of artificial intelligence (AI) analysis techniques.

AI is all about pattern recognition, often across data sets of dissimilar sources. Through analysis of data captured in the time domain, coupled with knowledge of the task being undertaken, a known-good state of health could be determined. AI would then be tasked to find anomalies in sound or vibration that correlate with increased current consumption or a rise in temperature – changes that could be indicative of a pending breakdown.
Further justification for Industry 4.0 investment
Such insights could lead considerable improvements in predictive maintenance, allowing teams to undertake precision servicing on specific machinery or robot joints, reducing downtime to the minimum required. It is also conceivable that this information could be used to pro-actively engage an emergency mode. This could involve slowing a robot’s motion down or reducing loading to maintain production until the next suitable moment for repairs arise.
With a multitude of compact, low-cost and highly integrated sensors available on the market, there is little reason not to consider implementing self-monitoring capabilities on industrial robots and automation systems. High-performance microcontrollers are also easy to integrate, providing a sensor fusion function to draw the many strands of data together, linked against a common time base.
Investments in an Industry 4.0 implementation, or upgrades of existing equipment to these standards, are easier to justify if there are more benefits through doing so. And with advances in AI, the flood of associated data generated by this approach will be easy to stem and analyze. If these increases in uptime and more efficient, data-based, predictive maintenance can be achieved, there are significant business margin and profitability opportunities available for those that implement them.
About the author:
Clemens Müller is Director Business Development Industrial Robotics at Infineon Technologies – www.infineon.com
caption
 If you enjoyed this article, you will like the following ones: don't miss them by subscribing to :
If you enjoyed this article, you will like the following ones: don't miss them by subscribing to :