Flying Robots Compete
It seems like a scene from Mission Impossible, but those are the requirements for this year’s International Aerial Robotics Competition. Indeed, the mission is almost impossible.
"We came in first place last year as the only robot that both entered and exited the building, but we were not able to retrieve the flash drive," Johnathan Bendes, a University of Michigan computer science student leading one of the competing teams, told us. "This year, we have a retractable magnet that we hope will be able to retrieve the flash drive."
Sponsored by the Association for Unmanned Vehicle Systems International (AUVSI), the competition is in its 18th year but only on its sixth mission. The contest is repeated until someone completes a mission. The purse starts at $10,000 and increases by $10,000 each year until a mission is completed. This year, it is up to $40,000. "That’s only a fraction of what it cost to build our robot, but that’s not the point," said Bendes. "The point is that the AUVSI intentionally makes the missions impossible. They don’t expect someone to win the first year. And when a team finally completes they mission, they have advanced the state of the art in robotics."
This year’s contest is particularly relevant. The Federal Aviation Administration recently certified two drones — Boeing’s Insitu ScanEagle and AeroVironment’s Puma — to operate in the US. Edward Snowden was admitted to Russia after fleeing the US. with classified secrets he removed from a secure area on CDs. The competition is using helicopter-like robots (not fixed-wing vehicles like the ScanEagle and Puma) to retrieve flash drives (instead of CDs), but the relevance is unmistakable.
To accommodate the 27 Asian and American entries, identical model buildings are hosting the contest in Grand Forks, N.D., and Beijing. Twenty-one of these teams entered the contest last year. Teams get four runs through the building to find the flash drive and bring it to the landing pad in less than 10 minutes. One team judged to have the best "static" design (regardless of its flight dynamics) gets a fifth run.
The University of Michigan’s entry is a built-from-scratch four-rotor helicopter with two video cameras, two range-finding lasers for measuring distance, and a MEMS inertial measurement unit. An Intel Atom processor, the main onboard computer, communicates wirelessly with a standard Linux laptop. The video cameras stream to the laptop, which runs pattern recognition algorithms to identify objects, build a map of the building’s interior, and identify the fastest exit route. The Atom processor handles all the real-time decisions and navigation tasks. An ARM Cortex-A8 (on a Gunsix Overo board) manages the sensors and attitude control, while an Amtel Xmega handles onboard data communications, power management, and safety shutdown functions.
Last year, the University of Michigan team hung a magnet from a fixed-length tether to pick up the flash drive, but the robot flew too close to a metal chair, and the magnet got stuck. This year, the team has attached the magnet to a retractable tether that can be lowered only when the flash drive is found.
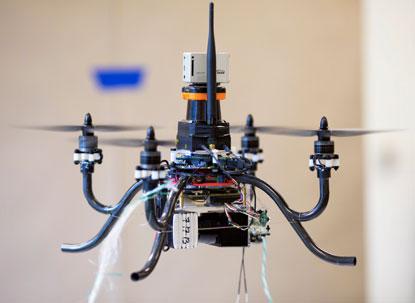
(Source: University of Michigan)
The team says that, if its design wins, it will spawn a new generation of aerial survey robots at a University of Michigan spinoff company, SkySpecs LLC.
 If you enjoyed this article, you will like the following ones: don't miss them by subscribing to :
If you enjoyed this article, you will like the following ones: don't miss them by subscribing to :